Right now in the industry, robotic implementation of manufacturing processes still relies on reprogramming, i.e., preprogramming process parameters and motion paths into the robot. The preprogramming makes robots lack adaptivity in addressing the dynamically changing manufacturing environment and conditions. Intelligent robotic automation of processes is based on a synthesis of advanced perception, process modeling, and adaptive control. In some cases, robots team up with human workers on completing complex tasks, where the robots are expected to assist humans besides independently performing tasks. The goal of the collaboration is to: 1) ensure safety in the collaborative workspace and 2) increase production efficiency.
In a recent study, we developed an online adaptive control system for robotic TIG welding, where the weld pool is sensed by an optical camera and pool width is controlled in a closed loop. From in-situ optical imaging, an efficient pixel-level image segmentation network is first developed to outline the pool area and estimate the pool width. Then the dependence of pool width on welding parameters is modeled through an efficient neural network, followed by an advanced gradient descent algorithm to backpropagate the needed pool changes to deltas of parameters to finish one control cycle. One major advantage of this control framework is efficiency: one control cycle is less than 1 second and it only takes a few cycles to transform the process from any initial state to the desired state.
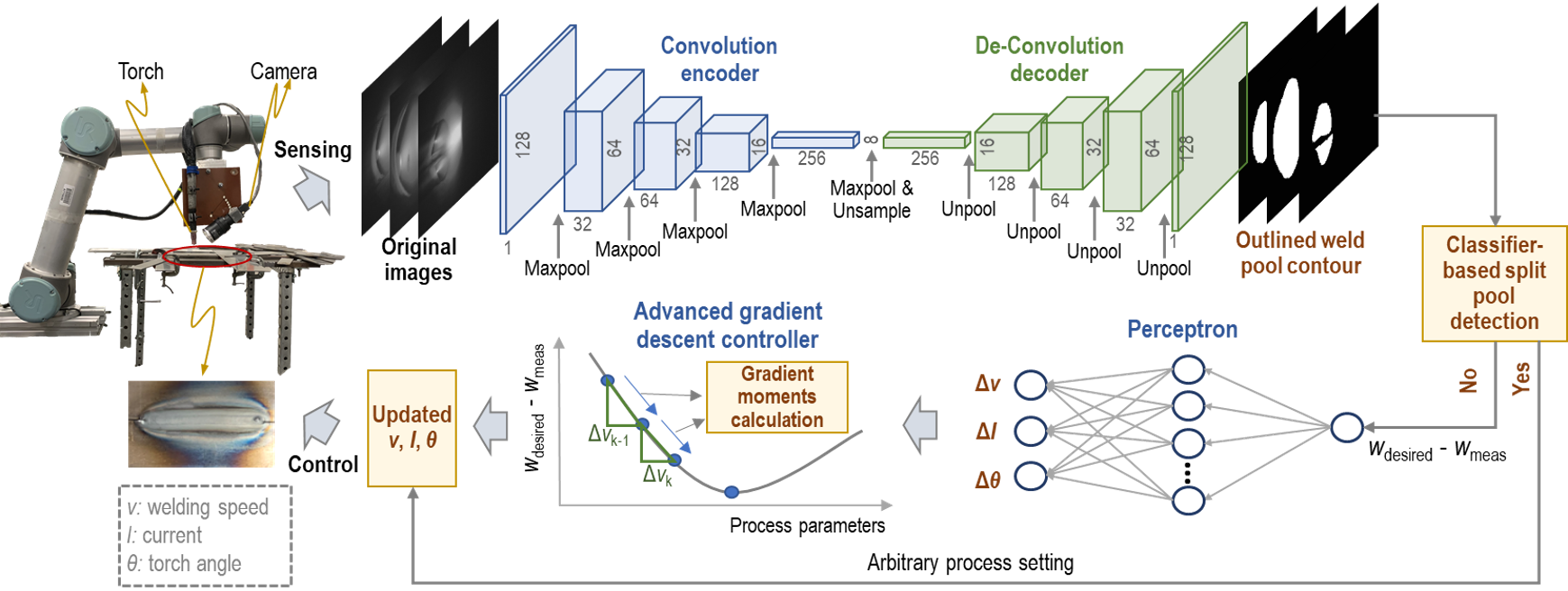
Demo of Adaptive Robotic Control of TIG Welding